






 BTC/HKD-1.46%
BTC/HKD-1.46% ETH/HKD-1.99%
ETH/HKD-1.99% LTC/HKD-0.29%
LTC/HKD-0.29% DOT/HKD-2.36%
DOT/HKD-2.36% ADA/HKD-2.49%
ADA/HKD-2.49% SOL/HKD-2.56%
SOL/HKD-2.56% XRP/HKD-2.29%
XRP/HKD-2.29% DOGE/US-1.64%
DOGE/US-1.64%報告出品方:廣發證券
以下為報告原文節選
------
一、機器之關節,旋轉傳動的紐帶
連接動力源和執行機構,下游應用廣
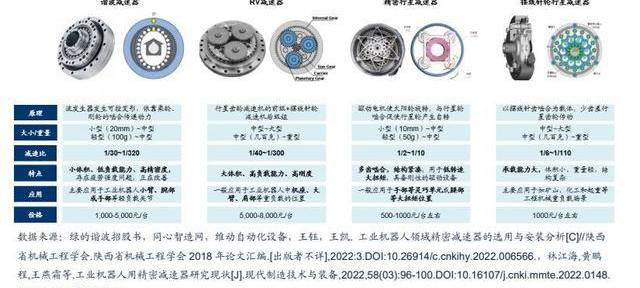
在機械傳動領域,減速器是連接動力源和執行機構之間的中間裝置。減速器的發展已有數百年的歷史并發展出多種減速器形式。已經成熟并已標準化的產品有圓柱齒輪、蝸輪、行星齒輪、擺線針輪減速器和諧波等;已經提出并正在推廣的產品有三環、活齒減速器等。
從結構上減速器分為定軸傳動、偏心驅動、斜面放大三大類。其中偏心驅動的減速原理是利用具有相對運動的、存在度量差的兩運動件的微差累積來實現減速器的力矩放大和低速輸出,具有少齒差轉動特征,包括變形類的諧波減速器、多齒的行星減速器等;斜面放大則是通過連續旋轉的斜面將沿斜面運動的圓周力在其正交方向放大,從而將旋轉運動轉變為直線運動,包括滾珠絲杠等。



減速機廣泛應用于國民經濟各領域,不同產品下游有所差異。諧波和RV減速器主要應用于工業機器人領域,同時部分應用于非標自動化、機床、半導體等精密制造行業;齒輪、擺線針輪等通用減速器則更廣泛應用于環保、建筑、電力、化工、食品等工業領域。

多個AI聊天機器人就比特幣成為世界儲備貨幣的能力進行了回復:金色財經報道,Bitcoin.com記者Jamie Redman就比特幣成為世界儲備貨幣的能力采訪了ChatGPT 3.5和ChatGPT 4,Bard,Claude Instant和Claude 4,以及Bing AI等流行的AI聊天機器人。其中:
ChatGPT 3.5發現很難評估比特幣和其他數字資產的潛力,理由是存在問題和不確定性。在他看來,獲得儲備貨幣地位的可能性取決于當前事件和加密貨幣生態系統的演變。
Bard指出,中央銀行和其他金融機構需要更多地采用比特幣,以及提高價格穩定性和改進區塊鏈技術。如果比特幣能夠克服這些挑戰,它可能會在未來十年內成為全球儲備資產。然而,這也有可能永遠不會發生,或者需要更長的時間才能達到這個目標。
Claude 4基于“對比特幣屬性和當前全球金融體系的分析”,評估了比特幣在未來10到15年內被認可為儲備貨幣的可能性從低到中等。
Claude Instant以穩定性和接受度問題的形式引用了比特幣的“重大障礙”,稱這種發展在未來 5-10 年內不太可能發生。
ChatGPT 4表示,比特幣要達到儲備貨幣地位還需要幾年甚至幾十年。聊天機器人指出了BTC的波動性、監管要求、來自其他加密貨幣的競爭和技術風險。
Bing AI列出了一些將決定比特幣命運的因素。包括:大量接受資產,包括被金融機構接受;技術創新和改進、可擴展性和可用性;加密貨幣法律地位的監管和管理、稅收和監管合規性;與其他加密資產和法定貨幣的競爭和互動。[2023/6/12 21:32:19]
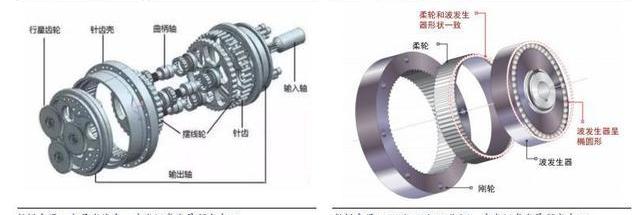
機器人常用減速器包括諧波、RV、行星齒輪、擺線針輪減速器,減速器選擇需要綜合考慮體積、減速比、扭矩和價格因素。諧波減速器:利用柔輪、剛輪和波發生器的相對運動減速,波發生器發生可靠形變后,依靠柔輪、剛輪的嚙齒傳遞動力。特點為小體積、低負載能力、高精密度,用在工業機器人小臂、腕部等輕負載關節,代表企業綠的諧波。RV減速器:由漸開線圓柱齒輪行星減速前級和擺線針輪行星減速后級兩部分構成,漸開線行星齒輪與曲柄軸連接成一起作為擺線針輪傳動部分的輸入,曲柄軸帶動擺線輪作偏心運動。其特點為大體積、高負載能力、高剛度,但價格昂貴,用在工業機器人機座、大臂等重負載的位置,代表企業雙環傳動。行星齒輪減速器:精密行星減速器在運行過程中一個太陽輪有多個行星輪繞轉,所以其體積小、質量較輕,相較于其他減速器啟動更加平穩,且剛性、精度和扭矩高。其特點為結構緊湊、低轉速大扭矩、價格便宜但減速比低,精密行星減速器用在直角坐標工業機器人,也可以用在人形機器人小型關節或者運動關節領域,代表企業為中大力德、兆威機電。
Elon Musk:將解決Twitter加密垃圾郵件機器人問題,但不喜歡Facebook的方式:金色財經報道,在特斯拉創始人Elon Musk被披露持有社交媒體巨頭Twitter公司9.2%股份后,加密社區用戶@Pranay Pathole向他提出需要解決Twitter上的加密垃圾郵件機器人的問題,因為這些機器人程序真的很煩人并建議改進Twitter驗證系統。
Elon Musk對此表示:的確如此,這也是他個人覺得Twitter上最煩人的一個問題。之后,Meta(原Facebook)首席技術官Boz回應稱:Facebook很早就解決了這個問題,只需包含一個已被編輯的指示器以及更改日志就可以。不過,Elon Musk回復說:Facebook讓我感到神經恐懼且有不適感。[2022/4/5 14:05:03]
擺線針輪行星減速器:以應用行星式傳動為基礎、以擺線針齒嚙合為載體的傳動裝置。其特點為承載能力大,而相對于RV減速器價格更低,常用在礦山、化工等重負載領域,在部分機器人領域也有所推廣。
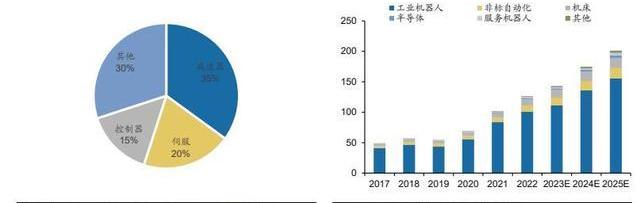
減速器是工業機器人核心零部件之一
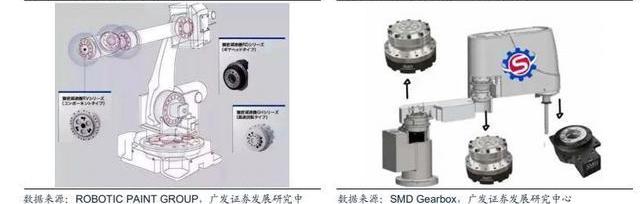
控制器、伺服電機和減速器是工業機器人的三個核心部件,從技術上決定了工業機器人的關鍵特性,如工作精度、負載、使用壽命、穩定性和可靠性,根據ResearchInChina數據,它們合計約占工業機器人成本的70%,其中減速機占35%,伺服電機占20%,控制器占15%。一般來說,機器人的每個關節都需要配置一臺減速器。根據綠的諧波招股書,每臺六軸多關節機器人需要搭配6臺精密減速器,其中負載10kg以下機器人主要使用諧波減速器;10-20kg及更高負載的機器人小臂、手腕關節可以采用諧波減速器,其余關節采用RV減速器。協作機器人全部關節使用諧波減速器,一般使用6-7個諧波減速器。SCARA機器人一般使用2-3臺諧波減速器。DELTA機器人一般使用3臺諧波減速器,可實現分揀等功能。
網紅機器人索菲亞的首件NFT數字作品將于周三拍賣:3月22日消息,據報道,機器人藝術家索菲亞(Sophia)的第一件藝術作品將于周三拍賣。索菲亞說,她這件作品的靈感來自于人類,未來也樂意跟人類進行創造性合作。
索菲亞,是香港的Hanson Robotics在2016年開發的人型機器人。她創作的這件NFT(非同質化代幣)數字藝術作品即將拍賣。這次拍賣也是由人工智能協同創作的這一類作品的首次拍賣出售。[2021/3/22 19:07:09]
人形機器人關節驅動模式影響減速器選擇
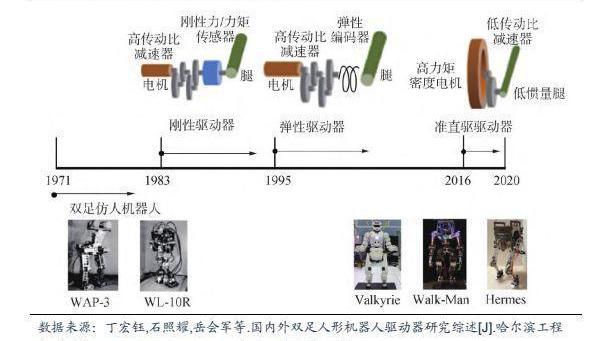
機器人電驅可以分為剛性驅動、彈性驅動和準直驅驅動等不同模式。雙足人形機器人關節運特點和人類類似,如運動速度快,機動性能好,步幅和步頻變化,高速碰撞等。這些運動特點要求驅動器具有高功率密度、高響應性、高能量利用效率和耐沖擊性等特性。為提高驅動器該類特性,逐漸發展出三類主流路線。1983年,早稻田大學研究的WL10R機器人使用剛性驅動器TSA(traditionalstiffnessactuator),自此雙足人形機器人開始廣泛應用剛性驅動器為關節動力源。剛性驅動發展歷史長、技術成熟度高,但是由于元器件工藝和原理上的限制,傳統剛性驅動器的功率密度很難達到生物肌肉的水平500W/kg,同時也解決不了機器人受外部沖擊時零部件強度問題,繼而產生了其他技術路線。1995年,麻省理工學院的Pratt等提出了彈性驅動器SEA(serieselasticactuator)的概念,并在美國宇航局的機器人Valkyrie和意大利技術研究院的機器人Walk-Man上得到應用,彈性驅動器模擬肌肉系統功能,使關節表現出柔順、安全和高能量效率特性。2016年,Wensing等提出了準直驅驅動器PA(proprioceptiveactuator),并將其應用于四足機器人Cheetah和雙足機器人Hermes,準直驅驅動采用電機加低傳動比減速器的方案,負載傳導路徑更加簡單,具有功率密度高,力控帶寬大,抗沖擊能力強等優點,準直驅驅動器成為最近幾年研究的熱點。
中國工程院院士:建議把區塊鏈等新技術融入到機器人當中:針對蕪湖機器人產業未來發展,中國工程院院士王耀南建議,提升企業的自動化水平和數字化、智能化生產線的水平,把互聯網、大數據、云計算、區塊鏈等新技術融入到機器人當中,完成從工業1.0到2.0的轉變,努力上升為工業3.0。(大江晚報)[2020/8/31]
不同驅動模式架構和特性不同,進而影響減速器等零部件的選型:
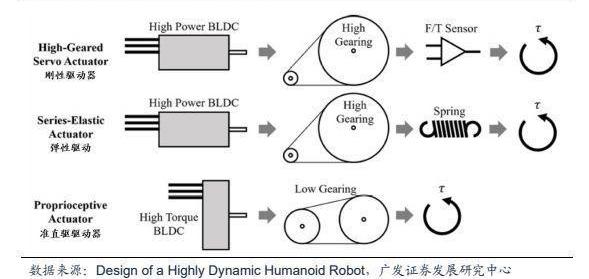
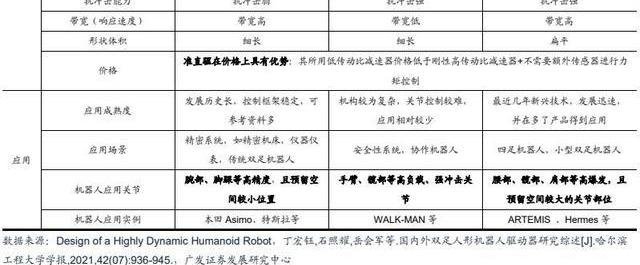
剛性驅動:①組成:一般采用高速電機+高傳動比減速器+高剛性力矩傳感器模式,諧波減速器憑借高減速比、重量輕、緊湊高效的特征獲得青睞,力/扭矩傳感器放置于關節末端進行感知控制。②特點:傳動比大+轉速低+扭矩密度高,因而具有更高的可控制精度,但是傳統剛性驅動器的功率密度很難達到生物肌肉的水平,同時也解決不了機器人受外部沖擊時零部件強度問題,適用于緩慢且相對靜態的運動。③應用:發展歷史長,控制框架穩定,本田Asimo、特斯拉人形機器人均采用該方案;同時,剛性驅動更為適配于腕部、腳踝等高精度,且預留空間較小位置。彈性驅動:①組成:在剛性驅動器的基礎上加入彈性體來增加機器人行走、奔跑、跳躍等運動能力,包括串聯、并聯、多模態等眾多模式。②特點:類比于動物利用剛柔并濟的肌肉骨骼系統在運動過程中儲存/釋放能量并實現緩沖,彈性驅動器使關節表現出柔順安全、高能量效率、強抗沖擊性的特性;但是較低的剛度會影響帶寬,進而降低響應速度并增加控制難度。③應用:機構較為復雜,關節控制較難,常用語高負載、強沖擊等特殊場景,如意大利技術研究院為解決救災機器人跌落和與環境的碰撞問題,設計了彈性驅動器,并應用于WALK-MAN機器人的手臂,具有較好的負載能力和抗沖擊能力。準直驅驅動:①組成:一般采用高扭矩密度電機+低傳動比減速器方案,常采用低轉速大扭矩的扁平化的力矩電機和低傳動比且結構緊湊的行星齒輪減速器;同時,電流可以作為力矩的測量方式,因而不需要配置力矩傳感器。②特點:傳動比小+轉速高+功率密度高,因為更為高效并具有更強的爆發力,同時準直驅在價格上具有優勢,其所用低傳動比減速器價格低于剛性高傳動比減速器,且不需要額外傳感器進行力矩控制;③應用:最近幾年新興技術,發展迅速,并在四足機器人和ARTEMIS、Hermes等雙足機器人也有所應用,該類機器人更善于運動;同時,準直驅驅動更為適配于腰部、髖部、肩部等高爆發,且預留空間較大的關節部位。
BM評論以太坊搶先交易機器人事件:這就是以太坊不適合DeFi的原因:Paradigm研究合伙人Dan Robinson和Georgios Konstantopoulos發布文章《以太坊是黑暗森林》。根據分析,有多個機器人在掃描以太坊Mempool,尋找從其他用戶獲利的方法。有人詢問Dan是否能收回意外發送到配對合約的Uniswap流動性代幣(價值約12000美元)。他最初的想法是這些代幣將被永遠鎖定,但后來意識到,如果這些代幣仍在那里,任何人都可以去恢復。任何人調用Uniswap核心合約上的函數時,該合約會測量自己的流動性代幣余額并將其燒掉,將提取的代幣提供給調用者指定的地址。
他們實施營救行動時遭遇搶先交易機器人:get交易確實被納入,但是出現UniswapV2: INSUFFICIENT_LIQUIDITY_BURNED錯誤,意味著流動性代幣沒了。結果是其get交易進入Mempool后幾秒鐘內,就有人執行調用并掃蕩走資金。
EOS創始人BM評論稱,這就是為何以太坊不適合DeFi。EOS上不存在文章所描述的問題,因為它速度太快,無法搶先交易,而且生產者是已知的,并且可以承擔責任。以太坊上發生的事情太可怕了。(Cryptoticker)[2020/8/30]

1.剛性驅動器:高扭矩密度+高精度,可執行復雜任務但爆發力不足
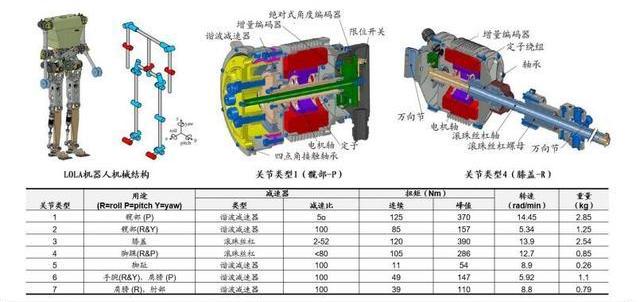
剛性驅動器在特斯拉人形機器人、本田Asimo機器人、慕尼黑工大LOLA機器人,特點為力矩密度大,力量控制精準,可以像人一樣執行復雜任務,但運動速度普遍較低,爆發力不足。特斯拉人形機器人身高1.72m體重56kg,共有40個主動自由度和6類執行器,實際可舉起68kg的物體,運動速度為8km/h,并能執行收拾杯盤等復雜任務,可以做到精準力矩控制,如碰撞到雞蛋不會打碎。其采用直線、旋轉兩類執行器,其中旋轉執行器為剛性結構,采用力矩電機+諧波減速器+位置/扭矩傳感器方案,旋轉執行器分為三種類型,其中之一扭矩達180Nm,僅重2.26kg,扭矩密度達80Nm/kg。本田Asimo機器人推出于2000年,身高1.30m體重50kg,共有57個自由度,單手抓力0.5kg,跑步速度為7km/s。Asimo可以進行面部、聲音的識別,具備敏捷的運動能力,可以向前跑步、向后退、單/雙腿跳躍,并能靈活地適應不斷變化的外部情況,如在不平坦的表面上行走;在執行任務方面,可以做到拿起玻璃瓶并擰開蓋子,或進行復雜手語表達。Asimo執行器采用伺服電機+諧波減速器的方案,并配有六力傳感、加速度、陀螺儀等多個傳感器。LOLA人形機器人推出于2006年,可以進行類似于人的步行運動,身高1.80m,共有22個自由度和7類執行器,運動速度5km/h。LOLA在膝蓋和腳踝采用滾柱絲杠線性執行器,特點為無間隙、無啟動扭矩、可反向驅動和靜音運行,并將大部分執行器的質量轉移到靠近臀部的位置,從而優化大腿的慣量;其余關節采用諧波減速器的剛性傳動方案,其髖部關節連續扭矩為125Nm,重量2.85kg,扭矩密度44Nm/kg,具有重量強、扭矩大的特點;同時,每個關節配有位置傳感器、角度編碼器、增量編碼器,其關節特點為高速狀態下良好的動態性能、緊湊集約以及高效率。

2.彈性驅動器:剛性驅動器基礎上的優化,提高抗沖擊能力
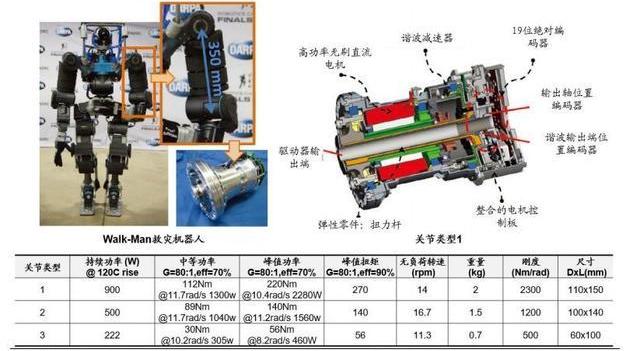
機器人在于環境相互作用中不可避免發生墜落事件,因此需要具備過載能力,在發生碰撞和跌到后能夠自我恢復。意大利技術研究院設計了新型的彈性驅動器,并應用于WALK-MAN機器人手臂,驅動器采用無框無刷直流電機+諧波減速器的模式,并在諧波減速器輸出端和驅動器輸出間設置了彈性零件扭力桿實現了防沖擊保護,并配有位置、扭矩、溫度傳感器。
3.準直驅驅動器:高功率密度和更好的抗沖擊能力,省去傳感器但半徑較大
準直驅驅動器依靠驅動器電機開環力控,不依賴于附加力或力矩傳感器,就可以本體感知機器人腳部和外界的交互力,也被稱為本體驅動器。驅動器有更高的功率密度,同時低傳動比減速器能夠更好將外部沖擊傳遞給電機,實現高帶寬力控和更好的抗沖擊能力。然而,大扭矩對電機的尺寸要求更為苛刻,電機呈現扁平化,執行器半徑更大。準直驅驅動器應用于MIT推出的Cheetah四足機器人以及UCLA推出的ARTEMIS人形機器人等。
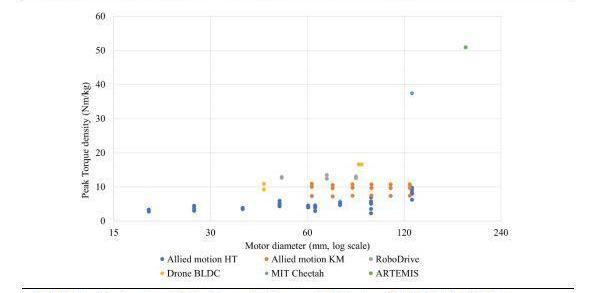
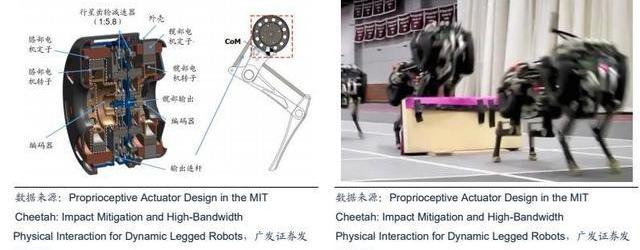
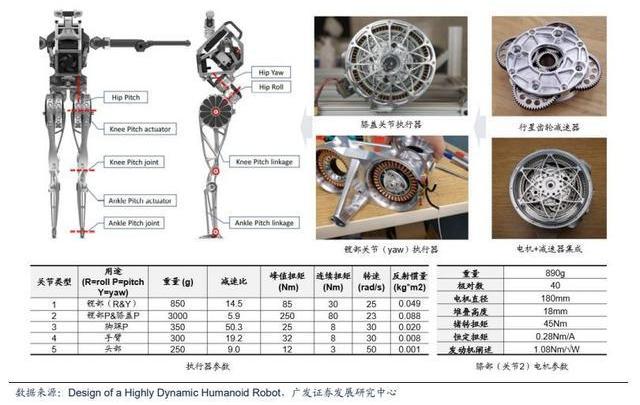
MIT的Cheetah四足機器人具備步行、跑步和跳躍能力,機器人的最高奔跑速度可達13.5m/s。此類行為涉及反復的高沖擊力和短暫的地面接觸時間,為了在如此短的時間內控制地面反作用力,系統必須具有高帶寬力控并能承受頻繁的高沖擊力。機器人采用準直驅執行器,定制設計大半徑的無框力矩電機,純電機扭矩密度達27Nm/kg;減速器選用減速比為5.8的單級行星齒輪減速器,低減速比提高動態運動能力;另外,機器人髖部和膝部的執行器同軸位于髖部,其中一個執行器直接驅動臀部,而另一個則通過平行連桿驅動膝蓋,旨在最大限度地減少質量和腿部慣性,從而最大限度地提高沖擊緩解系數。UCLA的ARTEMIS人形機器人身高1.42cm,體重37kg,行走速度2.1m/s,共有20個自由度和5種類型執行器,能夠在粗糙和不穩定的表面上行走,在外部撞擊中能保持平衡,跌到后重新站起,以及具備跑步、跳躍、足球運動等能力。機器人髖部/膝部P軸執行器采用寬大氣隙電機+行星齒輪減速器方案,執行器總重量3kg,連續扭矩80Nm,扭矩密度27Nm/kg。機器人腿部低反射慣性和高傳輸透明度可以使得機器人能夠本體感知力控,并在跑步和跳躍中降低沖擊力。
---報告摘錄結束更多內容請閱讀報告原文---
報告合集專題一覽X由定期整理更新
精選報告來源:報告派
科技/電子/半導體/
人工智能|Ai產業|Ai芯片|智能家居|智能音箱|智能語音|智能家電|智能照明|智能馬桶|智能終端|智能門鎖|智能手機|可穿戴設備|半導體|芯片產業|第三代半導體|藍牙|晶圓|功率半導體|5G|GA射頻|IGBT|SICGA|SICGAN|分立器件|化合物|晶圓|封裝封測|顯示器|LED|OLED|LED封裝|LED芯片|LED照明|柔性折疊屏|電子元器件|光電子|消費電子|電子FPC|電路板|集成電路|元宇宙|區塊鏈|NFT數字藏品|虛擬貨幣|比特幣|數字貨幣|資產管理|保險行業|保險科技|財產保險|機器人
本報記者吳婧上海報道 存量房貸利率下調或將落地。2023年7月14日,國務院新聞辦公室就2023年上半年金融統計數據情況舉行新聞發布會.
1900/1/1 0:00:00華為在深圳召開的2023創新和知識產權論壇上,華為副總裁兼知識產權部部長樊志勇透露,華為2022年的專利許可收入達到5.6億美元.
1900/1/1 0:00:00又一家銀行關停! 近日,國家金融監督管理總局官網批復顯示,重慶梁平澳新村鎮銀行擬通過解散方式實現村鎮銀行市場化退出,并已將存貸款業務全部清零.
1900/1/1 0:00:00哎,又是一款未上線前鋪天蓋地宣發結果上線發現其實挺一般的手游。就目前我玩這個游戲的體驗屬于是湊活能玩,一旦深入玩下去或者再往后面玩就會感覺缺點實在是*太多了點! 那今兒我們就來聊聊俗稱3D版DN.
1900/1/1 0:00:00原標題:以前來這里學習,現在來這里交友記者調查線上自習室App亂象法治日報記者趙麗實習生劉姣姣●用戶最初使用時,遇到了很多志同道合的朋友一起連麥學習,還有很多優秀的博主分享學習經驗,但現在.
1900/1/1 0:00:00美國這個國家,最喜歡在胸口掛塊紙牌子,然后在牌子上明晃晃地寫上“人權衛士”四個大字。如此一來,它便真的以為自己是“人權警察”了,對世界指手畫腳,無端干涉他國內政,殊不知它那塊“人權衛士”牌子的底.
1900/1/1 0:00:00


